这一章我们介绍Temporal-difference
learning(TD-learning),以及包含其中的Sarsa和Q-learning。我们先考虑下述表达式:
这是对上一章的一个更复杂的例子。R和X都是随机变量,v是一个函数,是一个常数。那我们也可以定义出个g(w):
并且根据采样的r和x,得出对应的观测的: 于是,我们就可以和RM算法联系起来,得到求解g(w)=0的迭代公式:
这个表达式就和我们待会看TD算法的时候看到的表达式非常像了。这个R就对应的reward,就是衰减因子,v就是state
value。
TD算法介绍
先看如何用TD算法求解给定策略π后的state value,也就是policy
evaluation。TD算法是一大类算法(包括sarsa,q-learning),也指用来估计state
value的特定算法,也就是我们现在要介绍的。
TD算法基于数据(experience)来强化学习,这些数据是根据策略π得到的,它们可以写作:或者。那么我们期待已久的TD算法就长这样:
我们注意,智能体在一个时刻只能访问到一个状态。这个算法就是,在t时刻,如果访问了状态空间的s状态,就更新这个状态的state
value;而对于其他没有访问的状态,就保持不动。
大多数时候,第二个公式是忽略的。第一个公式的详细标注为: 其中 叫做TD target,我们希望朝着这个方向去修改。TD
target和现在的value有个误差,叫做TD
error。总而言之,新的estimate是由旧的estimate加上一个修正项得到的。下面对TD
target 和TD error详细介绍。
第一,为什么叫做TD
target。这是因为TD算法要让朝着去改进。为了看出这点,我们做以下变形,两边同时减去TD
target: 由于是一个小的正数,那么显然,那么有: 这也意味着我们是朝着TD target前进的。
第二就是TD error:
。它表明了两个时间步的差,因此叫时序差分。它也反映了和之间的差。为什么这么说,因为当二者相等时,就应该为0。原因如下:我们把公式的改成 ,故而有: 我们对其求期望,得到: 因此在期望意义下,TD error能说明和之间的不一致。
TD有什么缺点呢?它只能估计给定一个策略下的state
value,不能估计action value,也不能寻找最优策略,因为TD只是在policy
estimation。但是在此基础上,能让他改的可以干这两件事。
从数学上讲TD算法是在干什么呢?它是在解一个给出策略后的贝尔曼方程,不同于我们最开始的基于模型的,TD是在不基于模型的条件下解贝尔曼方程。我们先给出一种贝尔曼方程的新表达式:
我们令是下一个状态,那么显然可以写成:
这个式子也叫做Bellman expectation
equation,TD算法就是在解这样一个equation。我们利用上节课所学的RM算法,定义:
根据定义我们知道是这个方程的解。如何求解这个式子?我们有一系列对于R和S'的采样,因此就可以observation:
对应的RM算法就可以写成:
这个和我们的TD算法是非常类似的,但是有两个问题,一个是他需要数据集合{(s,r,s')}
for k=1,2,3,与TD基于episode的取样不一样;第二个是不知道。
为了解决第一个问题,我们把{(s,r,s')}换成,为了解决第二个问题,我们把换成,这时的收敛性是可以保持的。具体证明就不阐述了。
TD和MC有什么区别?首先,前者是on-line的,即是一个episode是边采边更新的;后者是off-line的,即一个episode全采完后才能更新。其次,前者因为是on-line的,能够处理continuing
tasks,后者只能处理episodic
tasks。这些很重要,经常看论文能看到这些词汇。至于其他的,前者需要initial
guesses,后者不需要;前者因为采样随机变量少,具有low estimation
variance,后者具有high estimation variance。
Sarsa
我们要policy improvement的话,需要知道action
value,哪个value大就选哪个;因此我们引进Sarsa,来估计action
value。我们将此和policy improvement结合起来,就能找到optimal
policy。加入我们现在有如下数据:(看出来了嘛?这就是为什么叫sarsa,s
a r s a),那么我们可以利用sarsa算法来更新: 类似于TD,sarsa也是在解一个贝尔曼公式,这个公式是: 我们的最终目的是找到最优策略,所以我们还要把sarsa和policy
improvement结合起来(实际上大多数时候听到的sarsa是包括了后者的)。sarsa伪代码如下:
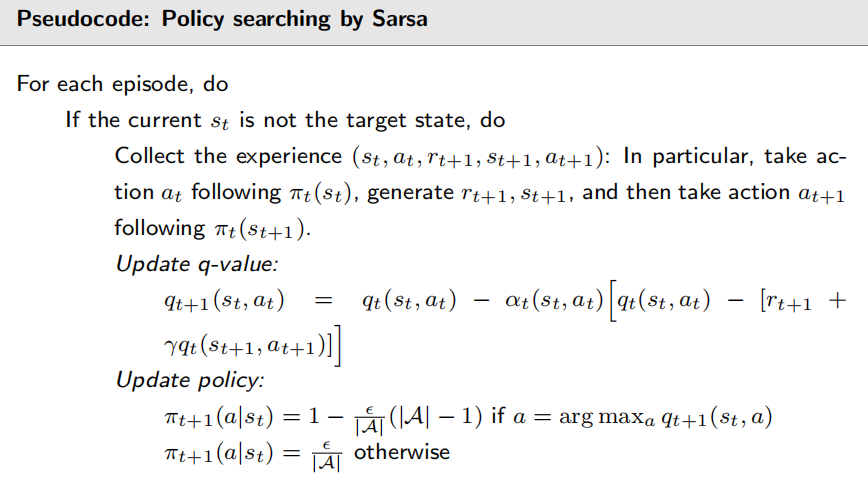
注意我们policy improvement采用的是epsilon-greedy。
Expected Sarsa
这是对经典sarsa的改进,公式为: 唯一的差别在于公式一的后面。改动的项具体为: 就是把action value变成了state
value。因为期望,它需要更多计算量,但是由于不需要对采样,所以随机变量减少了,随机性也变小了。同样的,expected
sarsa也在求解一个贝尔曼公式:
n-step Sarsa
它包含了sarsa和蒙特卡洛两种方法。考虑我们的回报
的不同写法:
当n趋近于正无穷,就变成了MC。那些然,居于Sarsa和MC中间的就是n-step
sarsa,它的公式显然就是:
Q-learning
直到今天Q-learning仍然在广泛使用,虽然用的是DQN。Q-learning从数学上讲,与sarsa区别是它主要是直接估计最优action
value,就不需要PE和PI交替进行了。Q-learning算法公式为: 和Sarsa很像。区别在于TD target,Sarsa的TD target是而Q-learning里是。在数学上,Q-learning解决如下数学问题,他是在求解一个贝尔曼最优方程而非贝尔曼方程:
为了更详细介绍Q-learning,先介绍两个重要概念:on-policy和off-policy。我们定义,behavior
policy是用来生成经验样本的,target
policy是用来不断朝着最优策略更新的。如果二者相同,那么就叫on-policy;不同就是off-policy。额,通俗的讲,就是前者是自己做自己学,后者是可以拿别人的给自己学(并不是说不能自己做自己学)。我们的sarsa是前者,Q-learning是后者。
off-policy的好处就是可以把别人产生的experience拿来自己用。如何判断一个RL算法是on
policy还是off
policy?第一就是看解决什么问题(贝尔曼还是贝尔曼最优);第二是看算法需要什么东西。sarsa和MC是off
policy的,为什么Q-learning是on-policy?
因为它求解贝尔曼最优方程,它显式地不含任何策略;其次,它需要,并不需要;而是依赖于p而不是π的,所以它的behavior
policy是根据策略从生成,而target policy是选q大的action。
Q-learning可以on policy也可以off-policy,二者伪代码分别如下:
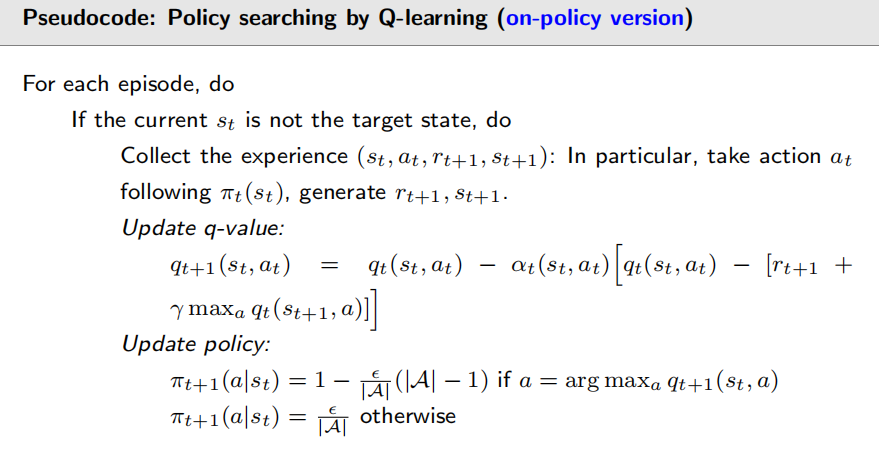
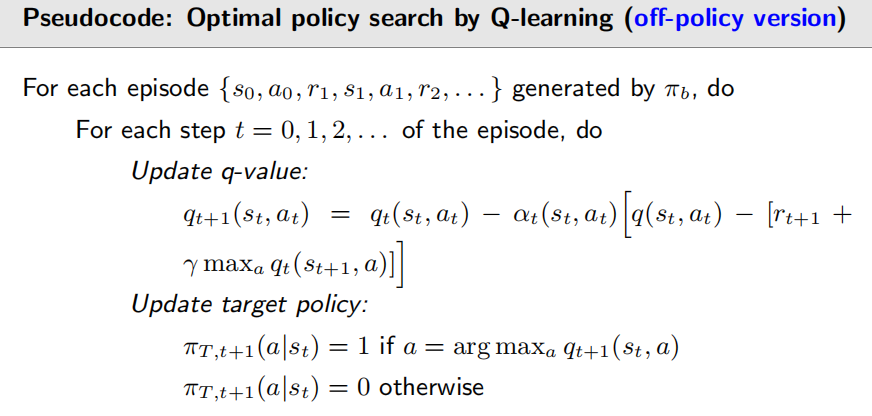
伪代码里的就是behavior
policy。
统一总结
所有介绍过的算法被写成以下形式: 并且:
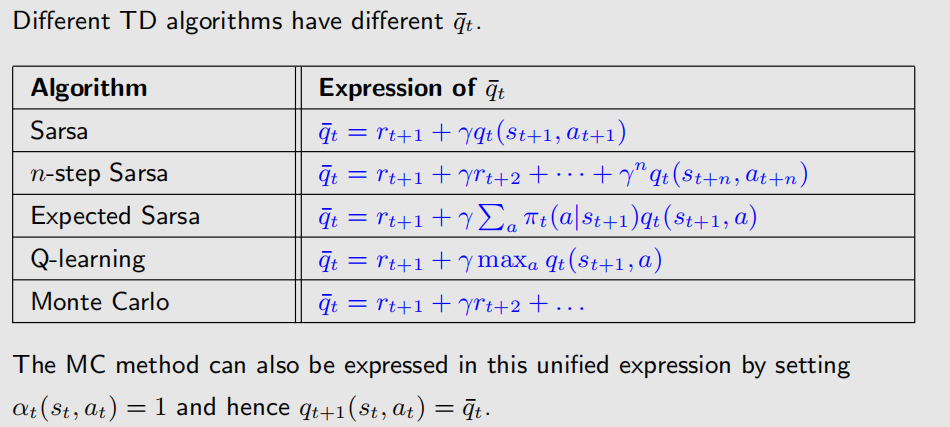
其中,只有Q-learning在求解BOE。

