
强化学习(零)
本节笔记参考自:《人工智能:现代方法 第4版》。
什么是智能体 (Agent)?
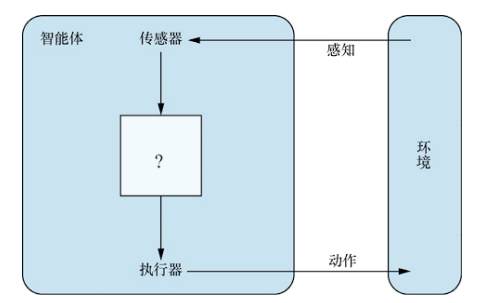
在书上有如下定义:任何通过传感器(sensor)感知环境(environment)并通过执行器(actuator)作用于该环境的事物都可以被视为智能体(agent)。
对人类来说,我们的眼睛和耳朵就是传感器;对机器人来说,它的红外探测器就可以看作是传感器。而环境是一个笼统的概念,我们所感知的周围的一切都可以看作环境,甚至整个宇宙。当然,实际问题中我们设计智能体中,所谓环境只关心智能体感知并且影响智能体动作的部分。关系如图所示。
术语感知(percept 名词)表示智能体的传感器正在感知的内容。感知序列(percept sequence)表示智能体所感知的一切完整历史。那么一个智能体如何作出动作选择呢?一般来说是根据它的内置知识以及目前为止整个感知序列。数学上讲,我们说智能体的行为由智能体函数(agent function)描述,这个函数的作用是:完成一个 感知序列→动作 的映射。
做着正确事情的智能体叫理性智能体(rational agent)。对于智能体表现的评价由性能度量(performance measure)描述。性能度量评估智能体在环境中的行为。给定到目前为止所看到的感知序列,理性智能体的动作是为了最大化性能度量的期望值。
(后续接着补)
强化学习概述
强化学习(reinforcement learning)是一种无监督学习,智能体与世界进行互动并定期收到反映其表现的奖励(reward)。
我们考虑下国际象棋的问题。如果采用监督学习,那么我们要训练出一个模型:
马尔科夫决策过程
转移模型
转移模型是指给定先前状态值时,最新状态变量的概率分布,即:

序贯决策问题
在这种问题中,智能体的效用取决于一系列决策。转移模型描述了每个状态下每个动作的结果,这些结果是有随机性的,我们写作
我们规定对于通过动作a从s到s'的每次转移,智能体都会收到一个奖励
策略
MDP问题的解是什么样子的?没有固定的动作序列可以求解这个问题,因为智能体可能会以一种与目标不同的状态结束。因此问题的解必须告诉智能体在任何可能的状态下应该作什么动作。这种解称为策略,通常用
最优策略(optimal policy)是指能够产生最大期望效用的策略,用
从奖励中学习
先前我们在MDP中提到了奖励的概念,而事实上强化学习的目标也是相同的:最大化期望奖励总和。在强化学习中,智能体本身处于MDP里,它可能不知道转移模型或者奖励函数,必须采取行动以了解更多的信息。只要为智能体提供正确的奖励信号,强化学习就能提供一种非常通用的构建人工智能系统的方法。
强化学习可以根据方法的不同如下分类。
基于模型的强化学习
这些方法中,智能体使用环境的转移模型来帮助解释奖励信号并决定如何行动。模型可能最开始未知,智能体通过观测它的行为带来的影响来学习模型;也可能是已知的。基于模型的强化学习系统通常会学习一个效用函数
无模型强化学习
这种方法中,智能体不知道环境的转移模型也不会学习这个模型。它会直接学习如何采取行为方式。主要有以下两种形式:
动作效用函数学习
动作效用函数(action-utility function),也称Q函数(Q-function):
策略搜索
智能体学习一个策略
多智能体环境
很多时候一个智能体必须在包含多个行动者的环境中作出决策,这样的环境称之为多智能体系统(multiagent system)。在这种系统中,智能体要解决多智能体规划问题,其合适的解决方法取决于环境中各智能体间的关系。
上文中我们对强化学习做了一些概述,但都只是对于单智能体而言。下面主要介绍多智能体。By the way,多智能体强化学习的学习需要有博弈论的相关知识。从决策者的角度,多智能体系统分为单决策者和多决策者。
单决策者
我们考虑环境里有多个行动者,但只有一个决策者。此时,决策者告诉其他智能体该做什么。我们假设“智能体会简单地执行被告知的事情”——这个假设称作仁者假设(benevolent agent assumption)。但是即便在仁者假设下,多个行动者的行动也要考虑同步关系。对行动者A和B,他们可能会同时行动,也可能同一时刻某动作必须互斥,也可能必须满足某种先后关系(序贯动作)。
当然,如果每个主体的信息都能集中起来,然后给总体规划进行执行,那么一个多体问题也可以看作一个单智能体问题。当这种集中是无法实现时,我们就面临分散规划(decentralized planning)问题。
多决策者
不同于单决策者情况——试想我们环境中其他行动者也是决策者,它们中每一个都有着自己的偏好,都会自己规划、自己选择。我们称之为对应体(counterpart)。此时可分为两个情况:
1.虽然有多个决策者,但是共同目标是相同的。此时的问题主要是协调问题(coordination problem):每个人都要朝着一个方向努力,不能彼此破坏规划。
2.每个决策者都有自己的偏好,即使这些偏好截然相反。
显然,这就意味着我们要进入博弈论的领域了。博弈论是多智能体系统决策的理论基础。博弈论可以通过两种方式用于人工智能:
1.智能体设计。智能体用博弈论分析可能的决策,假设其他智能体采取理性行动时计算每个决策的期望效用。
2.机制设计。 我们可以定义环境规则,即智能体必须参与的博弈,使得每个智能体都采用自身效用最好的方案时,最大化集体利益。
博弈论为我们提供了一系列不同的模型,其中每个模型都有自己的一套基本假设。其中最重要的区别在于我们是否应该将其视为合作博弈。博弈分两种:
· 合作博弈。智能体之间存在一个具有约束力的协约,保证智能体之间稳健合作。
· 非合作博弈。 非合作并不是说只有竞争没有合作。它只是说,没有中心协约来约束所有智能体合作,智能体可以自行决定合作,只要最大化自己利益就行。

