
openCV踩坑汇总
opencv总是在许多地方设定一些奇奇怪怪的反常识的坑,此贴以供记录。本帖主要记录python的opencv;同时对于有些版本引起的问题可能无法涉及。
图像的shape:并不是宽比高
假设我们现在有一张1920*1080的图片,我们用img = cv2.imread("1.png") 去读取,然后输出image.shape,会得到:
1 | (1080, 1920, 3) |
可见img.shape输出的是:高、宽、通道数。但尤其注意,resize的时候,cv2.resize()输入的是(宽,高)而不是(高,宽)!!
另外,openCV的通道排列是B、G、R。
普通棋盘版标定规则
(应该是这样,老师讲过但是有点记不得了)首先,请确保您的标定板的行列角点数是一奇一偶。在openCV的实现中,角点的排列顺序时:以奇数角点的方向为x轴,以偶数角点的方向为y轴;以黑色方块角落为原点。可能听起来比较绕,看下图:
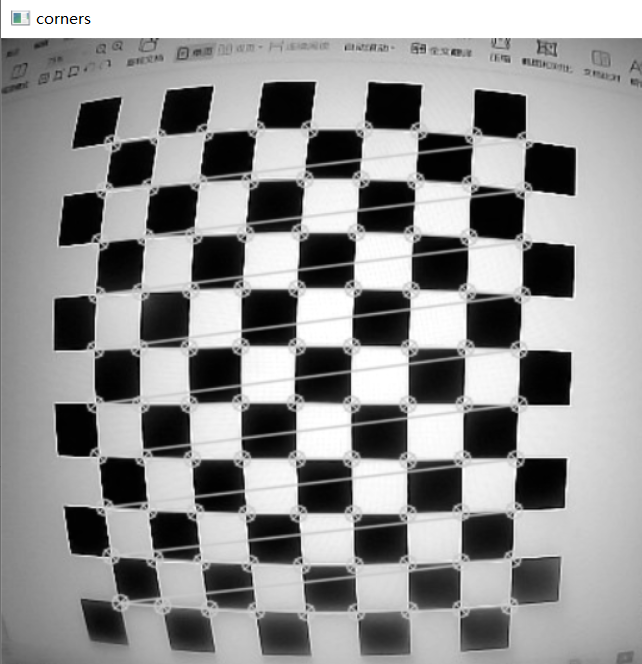
这是openCV画出来的角点,我们每行是9个角点,每列是10个角点,所以向右是x轴,向下是y轴。然后,我们从原点角点开始,向右且逐行地扫描角点。
为什么我们要关注这个?因为要建立世界坐标系下角点和像素坐标系下角点的一一对应关系,这样你世界坐标系的点也这么排列,就能建立起来对应关系了。否则标定结果是完全错误的。
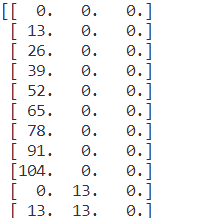
还是举个例子,比如这个图中,我们棋盘格世界坐标系下角点间距13mm,那么输出世界坐标系中的角点坐标(部分):
接着,输出像素坐标(为什么不是整数?或许是因为插值,还请高人指点):
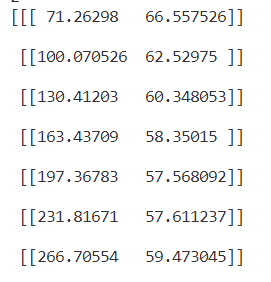
(这里我只截图了部分,但实际输出就是九个一换行,是一一对应的)
最后,来一张我老师的标定板吧,这个是标准的标定板格式。

鱼眼相机标定
在python里用cv2.fisheye.calibrate的时候是没有提示的,但是其实是有这个模块的。如果按照普通标定板,参考官网教程的话,它的objectpoints是(N,3)的:

但是如果你直接用这个points作鱼眼相机标定函数的参数的话,会报错:
1 | opencv-python\opencv-python\opencv\modules\calib3d\src\fisheye.cpp:753: error: (-215:Assertion failed) objectPoints.type() == CV_32FC3 || objectPoints.type() == CV_64FC3 in function 'cv::fisheye::calibrate' |
他会说你的数据类型不是CV_32FC3,这个意思是32float,3通道。而事实上,鱼眼相机标定要求的世界坐标系点是(N,1,3),我们把objp的格式改成(N,1,3)就能运行了 (我也很懵b):

比如这是修改前的,按照官方教程来的 角点的世界坐标和像素坐标下的shape:
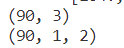
修改后上面就是90,1,3了。没想到官方文档还会坑人啊,真麻了。


